 09112441370
09112441370

فصل اول
مفاهیم اولیه کنترل
تعریف کنترل :
درک و تحت فرمان درآوردن یک سیستم است .
خروجی سیستم کنترل :
پارامتری است که تغییراتش برای ما مهم است ؛ به عبارت دیگر خروجی سیستم کنترل یک عامل اثرپذیر در سیستم است .
ورودی سیستم کنترل :
ورودی یک عامل اثر گذار در سیستم است . به عبارت دیگر آنچه از خارج سیستم بر آن اثر می گذارد و باعث تغییر در متغیرهای حالت سیستم می شود ورودی نام دارد .
متغیرهای حالت :
متغیرهایی هستند که با دانستن مقادیر آن ها در هر لحظه مشخص ، بتوان وضعیت و رفتار سیستم در آن لحظه را معین نمود . به عنوان مثال در سیستم جرم و فنر برای مشخص شدن وضعیت جرم در هر لحظه باید تغییر مکان اولیه و سرعت اولیه جرم را بدانیم ، پس این دو متغیر ( x , x) متغیرهای حالت در سیستم جرم و فنر هستند .
سیستم دینامیکی :
سیستمی است که دارای حافظه بوده و گذشته خود را به خاطر داشته باشد و رفتارش در هر لحظه به رفتارش در گذشته بستگی داشته باشد .
سیگنال :
اجزایی است که بین دو سیستم و یا در یک سیستم مبادله می شود .
اغتشاش :
سیگنالی است که بر خروجی سیستم اثر نامطلوب می گذارد .
کنترل سیستم :
یعنی به نظم در آوردن یا تنظیم خروجی سیستم که تنها راه رسیدن به آن ، کنترل و تنظیم ورودی سیستم است .
سیستم کنترل فیدبکی :
سیستمی است که از راه مقایسه ورودی و خروجی با استفاده از اختلاف آن ها به عنوان ابزار کنترل ، رابطه از پیش تعیین شده میان ورودی و خروجی را حفظ می کند .
سیستم کنترل حلقه باز :
سیستم کنترلی است که خروجی آن تاثیری بر سیگنال ورودی ندارد .
اشکال سیستم حلقه باز در این است که در آن نمی توان اثر اغتشاشات مختلف وارد شده بر سیستم را بر روی خروجی تضعیف نمود .
در حالیکه این امر در سیستم حلقه بسته امکان پذیر است .
سیستم کنترل حلقه بسته :
سیستم کنترلی است که در آن سیگنال خروجی بر ورودی سیستم تاثیر می گذارد .
در سیستم کنترل حلقه بسته می توان اثرات اغتشاش های ورودی ( نویز ) را تا حد امکان کاهش داد یا از بین برد .
خصوصیات سیستم کنترل حلقه باز :
1- ارزان تر بودن و سادگی سیستم
2- دقت متوسط یا کم ( ویژگی منفی )
3- پاسخ آهسته ( ویژگی منفی )
4- مطرح نبودن مسئله پایداری
5- حساسیت زیاد نسبت به تغییر شرایط محیط و اغتشاشات ( ویژگی منفی )
خصوصیات سیستم کنترل حلقه بسته :
1- دقت بالا
2- پاسخ سریع
3- استقلال نسبی از شرایط محیط و نویز در مقایسه با سیستم حلقه باز
4- پیچیدگی سیستم و گران بودن آن
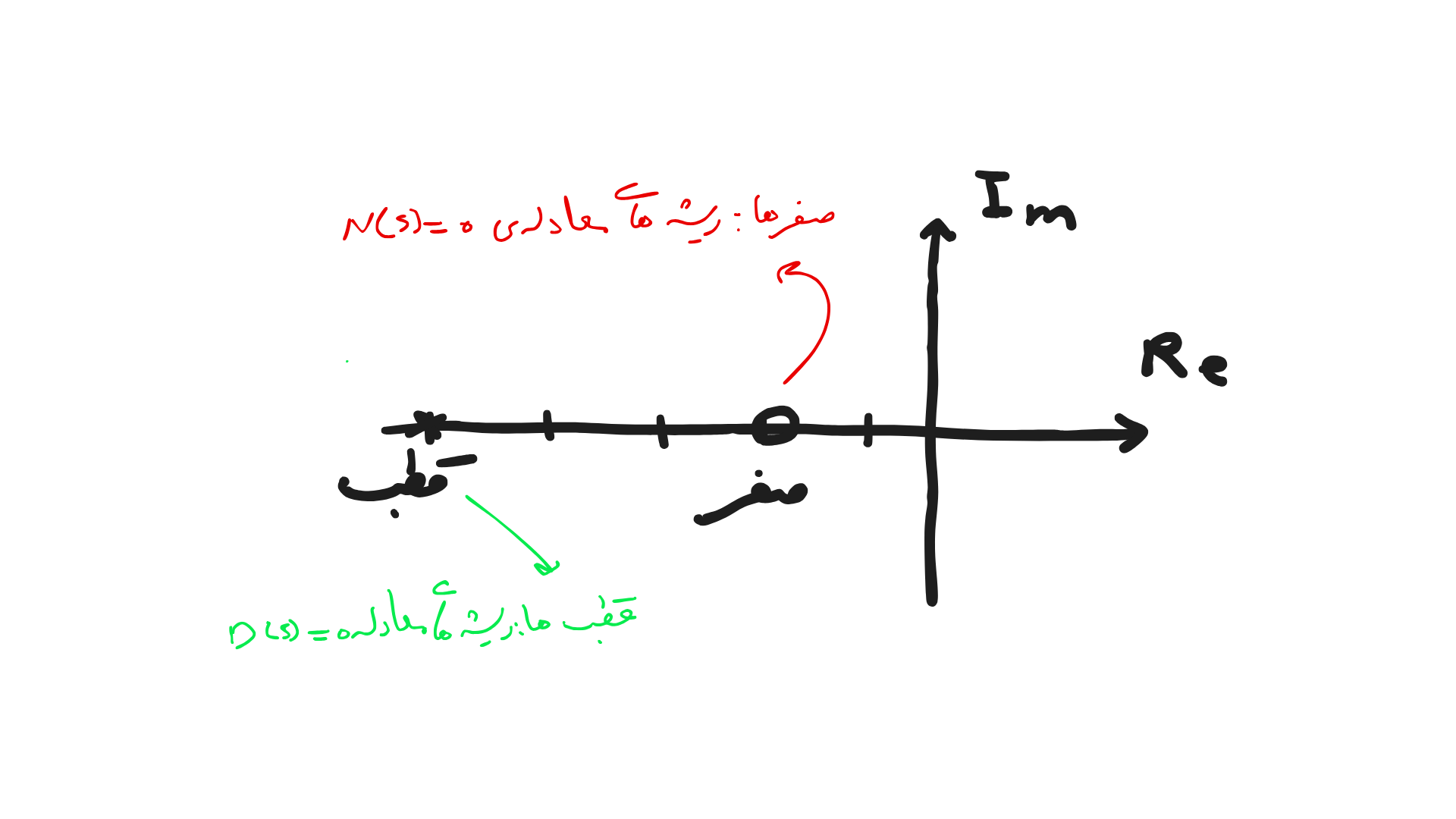
صفرها و قطب های سیستم
در تابع تبدیل کسری G(s)=N(s)/D(s) صفرهای سیستم مقادیری هستند که به ازای آنها تابع تبدیل G(s) =0 و یا به عبارت دیگر صورت کسر صفر می شود ، یعنی N(s)=0 می شود .
همچنین هر مقداری که مخرج کسر را صفر نماید قطب سیستم مورد نظر نامیده می شود ، به عبارت دیگر به ازای قطب های سیستم تابع تبدیل G(s) مساوی بی نهایت می شود . بنابراین :
صفرها : ریشه های معادله N(s) =0
قطب ها : ریشه های معادله D(s) =0
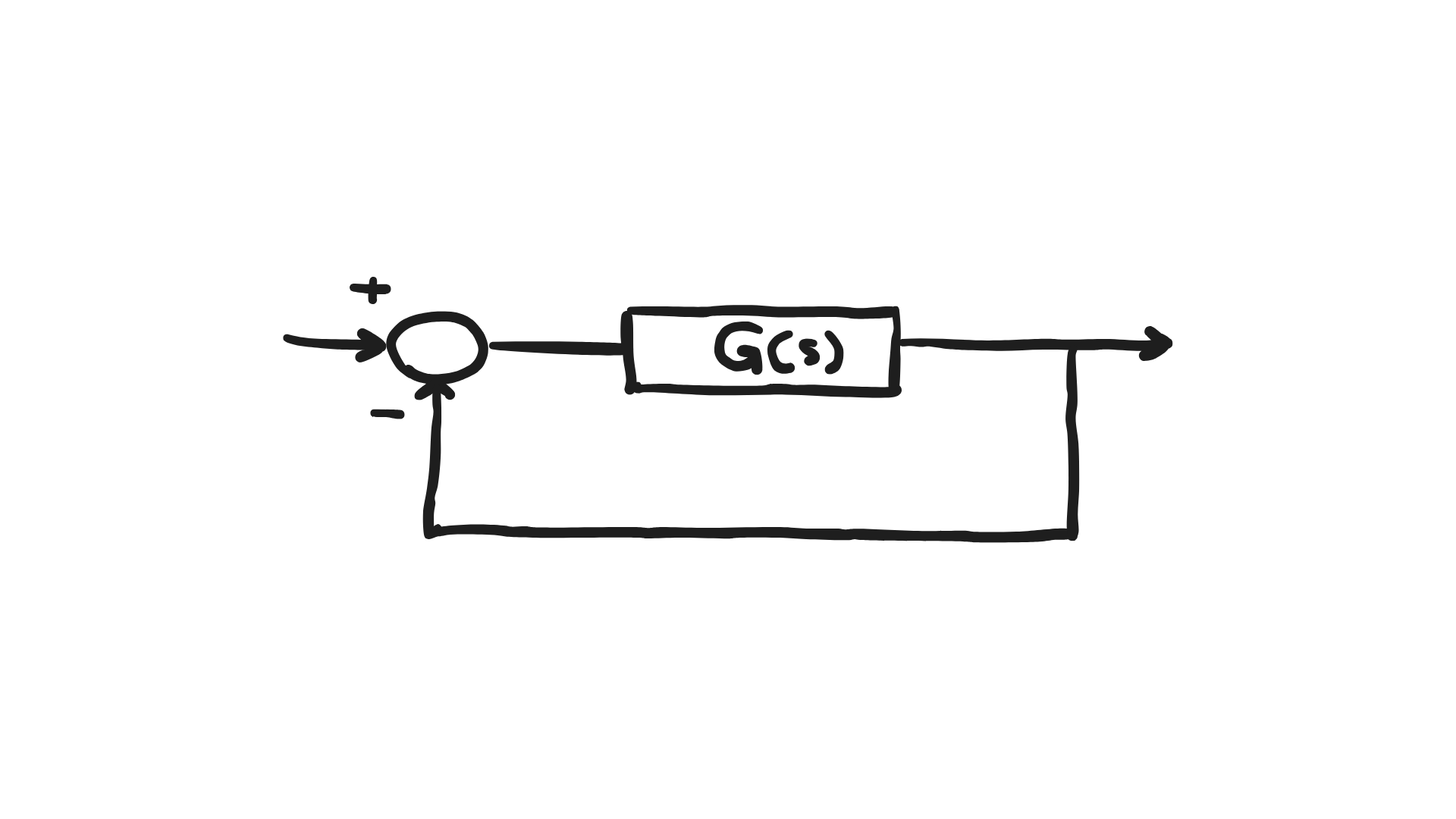
 تابع تبدیل حلقه باز و تابع تبدیل حلقه بسته سیستم نشان داده شده به ترتیب زیر می باشد :
تابع تبدیل حلقه باز و تابع تبدیل حلقه بسته سیستم نشان داده شده به ترتیب زیر می باشد :
G(s) = N(s)/D(s) = تابع تبدیل حلقه باز
N(s) /N(s) +D(s) =G(s) /1 +G(s) = تابع تبدیل حلقه بسته
 همانطور که مشاهده می شود ، G(S) به صورت تقسیم دو چند جمله ای N(s) ، D(s) در نظر گرفته شده است که در آن درجه چند جمله ای صورت کوچکتر یا مساوی چند جمله ای مخرج است .
همانطور که مشاهده می شود ، G(S) به صورت تقسیم دو چند جمله ای N(s) ، D(s) در نظر گرفته شده است که در آن درجه چند جمله ای صورت کوچکتر یا مساوی چند جمله ای مخرج است .
مقادیری از S که صورت تابع تبدیل سیستم را برابر صفر نمایند « صفرهای سیستم » نامیده می شوند . واضح است که صفرهای سیستم حلقه بسته همان صفرهای سیستم حلقه باز ( ریشه های چند جمله ای N(s) ) هستند .
در مقابل ، مقادیری از S که چند جمله ای مخرج تابع تبدیل سیستم را مساوی صفر می گردانند « قطب های سیستم » نامیده می شوند و پیداست که ریشه های چند جمله ای N(s) + D(s) متفاوت هستند .
بنابراین قطب های سیستم حلقه باز با قطب های سیستم حلقه بسته متفاوت هستند .
تابع تبدیل یک سیستم کنترل را می توان به صورت G(s) =k(s+z1)(s+z2)/(s+p1)(s+p2) نیز نشان داد که در آن پارامترهای Z نشان دهنده صفرها و P ها نشان دهنده قطب های سیستم هستند .
تست : مهندسی هسته ای _ سال 74
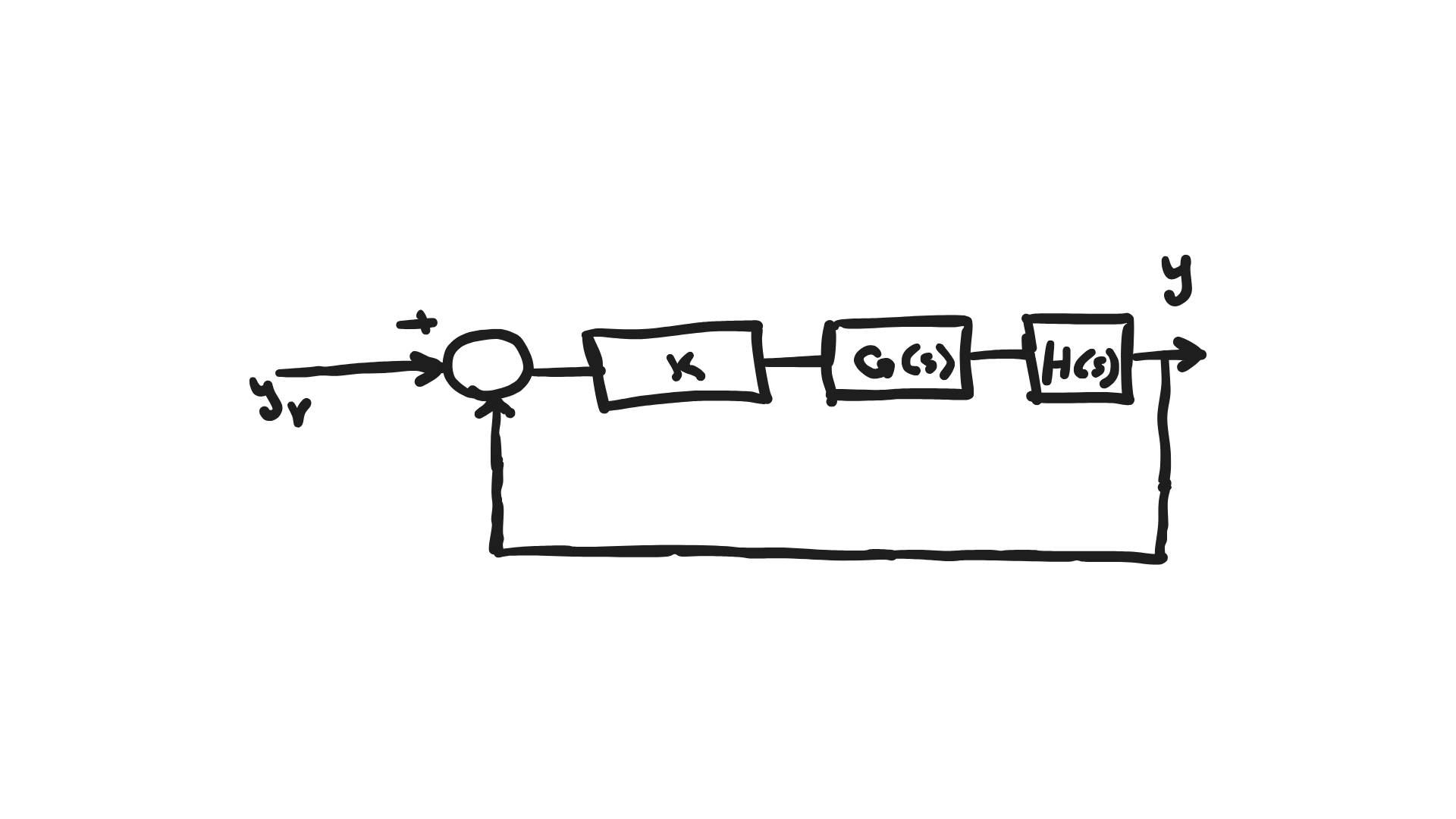
در سیستم فیدبک زیر برای K>0 کدام گزاره صحیح است ؟
1) صفرهای مدار بسته و قطب های مدار باز متفاوتند و بستگی به مقدار K دارند .
2) صفرهای مدار بسته همان صفرهای مدار بازند ولی قطب های مدار بسته بستگی به مقدار K دارند .
3) صفرهای مدار بسته به مقدار K بستگی دارند ولی قطب های مدار بسته همان قطب های مدار بازند .
4) صفرها و قطب های مدار بسته همان صفرها و قطب های مدار بازند .
تابع تبدیل حلقه باز سیستم عبارت است از KG(s)H(s) در حالیکه تابع تبدیل حلقه بسته سیستم عبارت است از
KG(S)H(S) /1+KG(S)H(S) در صورتیکه H(S) ، G(S) به صورت نسبت چند جمله ای های A ، B ، C و D بیان شوند توابع تبدیل حلقه باز و حلقه بسته سیستم به ترتیب عبارت خواهند بود از :
KAC/BD = KC/D . A/B = KG(S) H(S) = تابع تبدیل حلقه باز
(KAC /BD+KAC = KA/B C/D) /(1+KA/B C/D) = تابع تبدیل حلقه بسته
بنابراین صفرهای تابع تبدیل مدار بسته و مدار باز یکی است ، اما قطب های مدار باز و مدار بسته با هم متفاوت هستند و قطب های مدار بسته به مقدار K بستگی دارند . گزینه 2 صحیح است .
تست : مهندسی هسته ای _ سال 74
کدام یک از گزینه های زیر صحیح است ؟
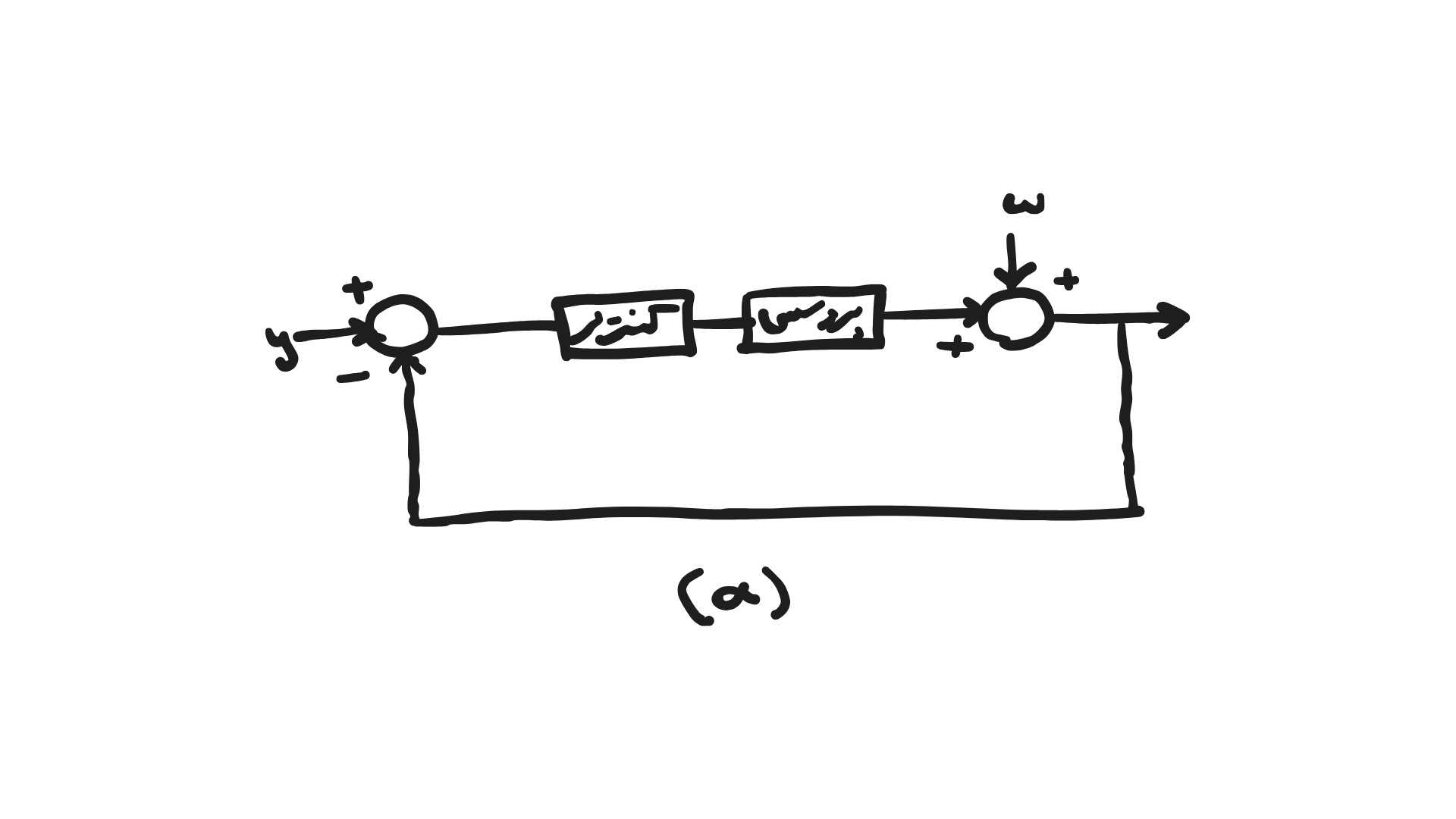
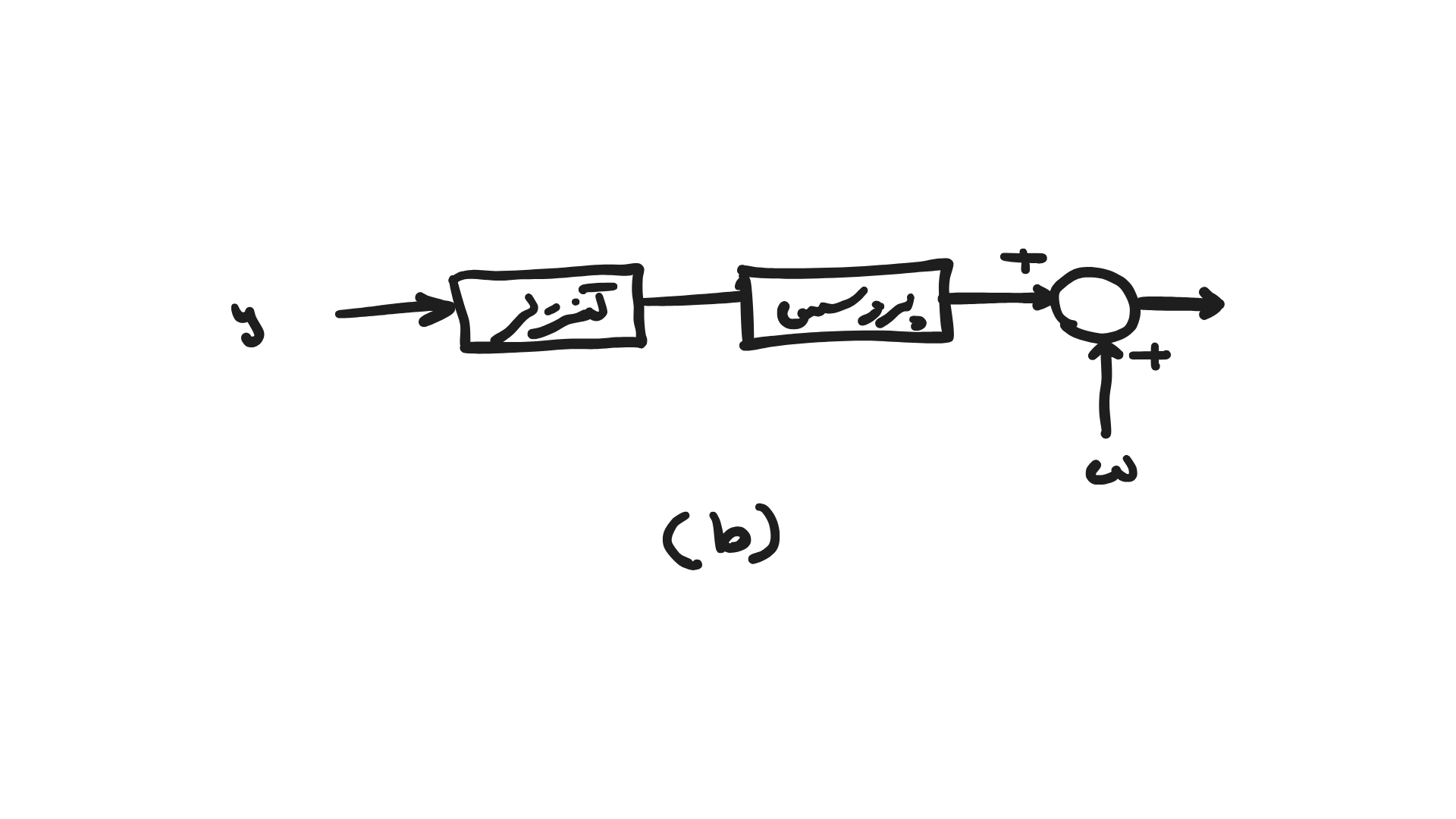
1) سیستم (a) نسبت به ورودی مزاحم w ( امگا) و تغییرات پارامترهای پروسس مقاوم تر از سیستم (b) است .
2) سیستم (b) نسبت به ورودی مزاحم w ( امگا ) و تغییرات پارامترهای پروسس مقاوم تر از سیستم (a) است.
3) سیستم (a) نسبت به ورودی مزاحم و سیستم (b) نسبت به تغییرات پارامترهای پروسس مقاوم ترند .
4) سیستم (b) نسبت به ورودی مزاحم و سیستم (a) نسبت به تغییر پارامترهای پروسس مقاوم ترند .
سیستم ( a) نمایشگر یک سیستم کنترل مدار بسته با فیدبک واحد است .
در حالیکه سیستم ( b) یک سیستم کنترل حلقه باز را نشان می دهد .
همانطور که در متن درس اشاره شده است سیستم کنترل مدار بسته یعنی سیستم ( a ) نسبت به اغتشاشات ورودی و تغییر پارامترهای پروسس مقاوم تر از سیستم کنترل مدار باز یعنی سیستم ( b ) است .
گزینه 1 صحیح است .
فصل دوم
مدل سازی سیستم های دینامیکی
در سیستم استاتیکی خروجی در هر لحظه به ورودی در همان لحظه بستگی دارد ، اما در سیستم دینامیکی خروجی در هر لحظه به ورودی در آن لحظه و لحظات قبل از آن بستگی دارد .
مشخصات یک سیستم کنترلی :
1- باید سریع باشد .
2- باید دقیق باشد .
3- باید عکس العمل پایدار داشته باشد .
تابع تبدیل : تابع تبدیل یک سیستم نسبت تبدیل لاپلاس خروجی سیستم به ورودی سیستم با فرض شرایط اولیه صفر است .
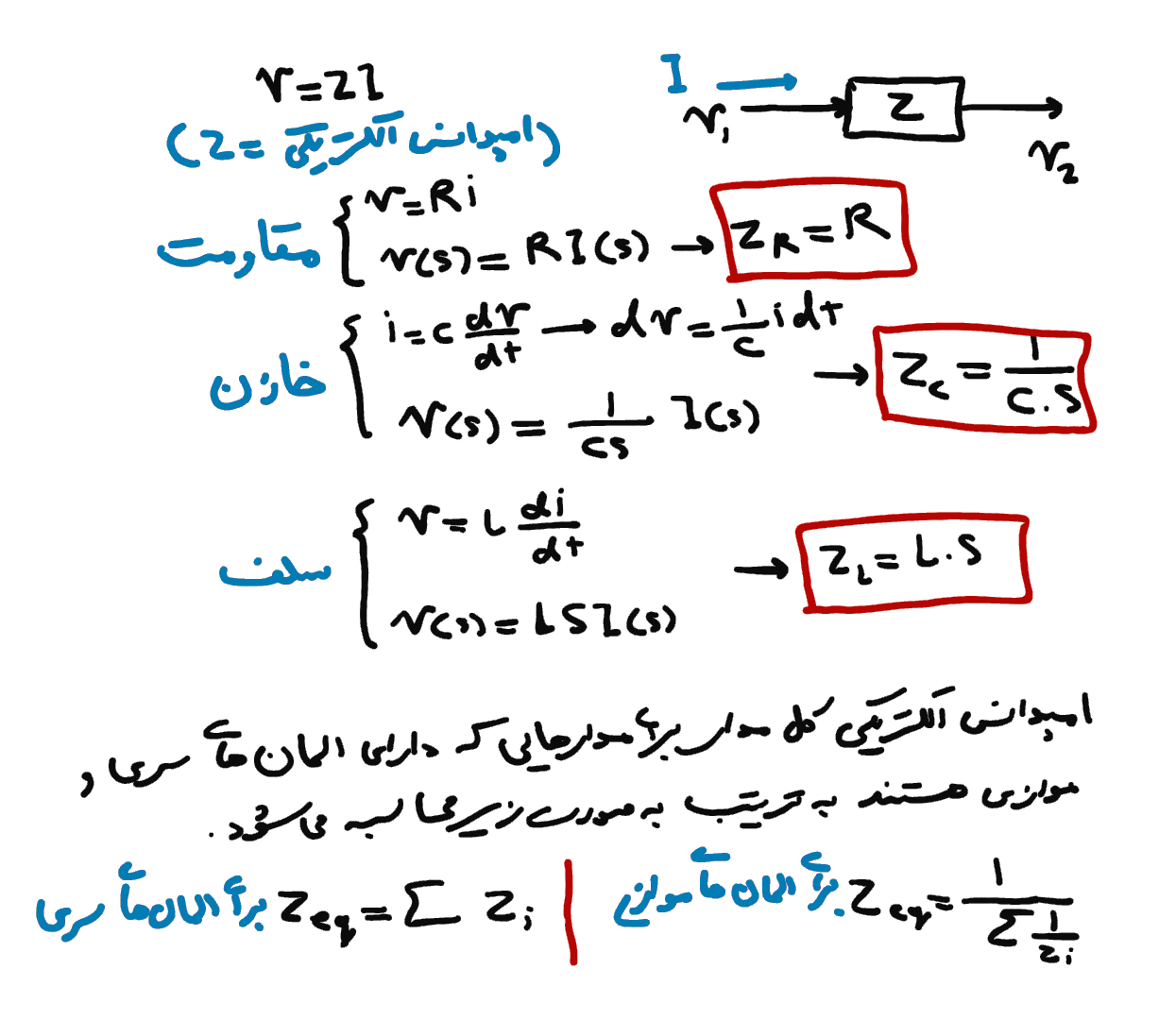
مدل سازی بر اساس روش امپدانس الکتریکی :
در این روش امپدانس الکترکی یا مقاومت الکتریکی معادل هر یک از اجزا ( مقاومت ، خازن و سلف ) را محاسبه می کنیم و مدار الکتریکی را به صورت مجموعه ای از این امپدانس ها در نظر می گیریم .
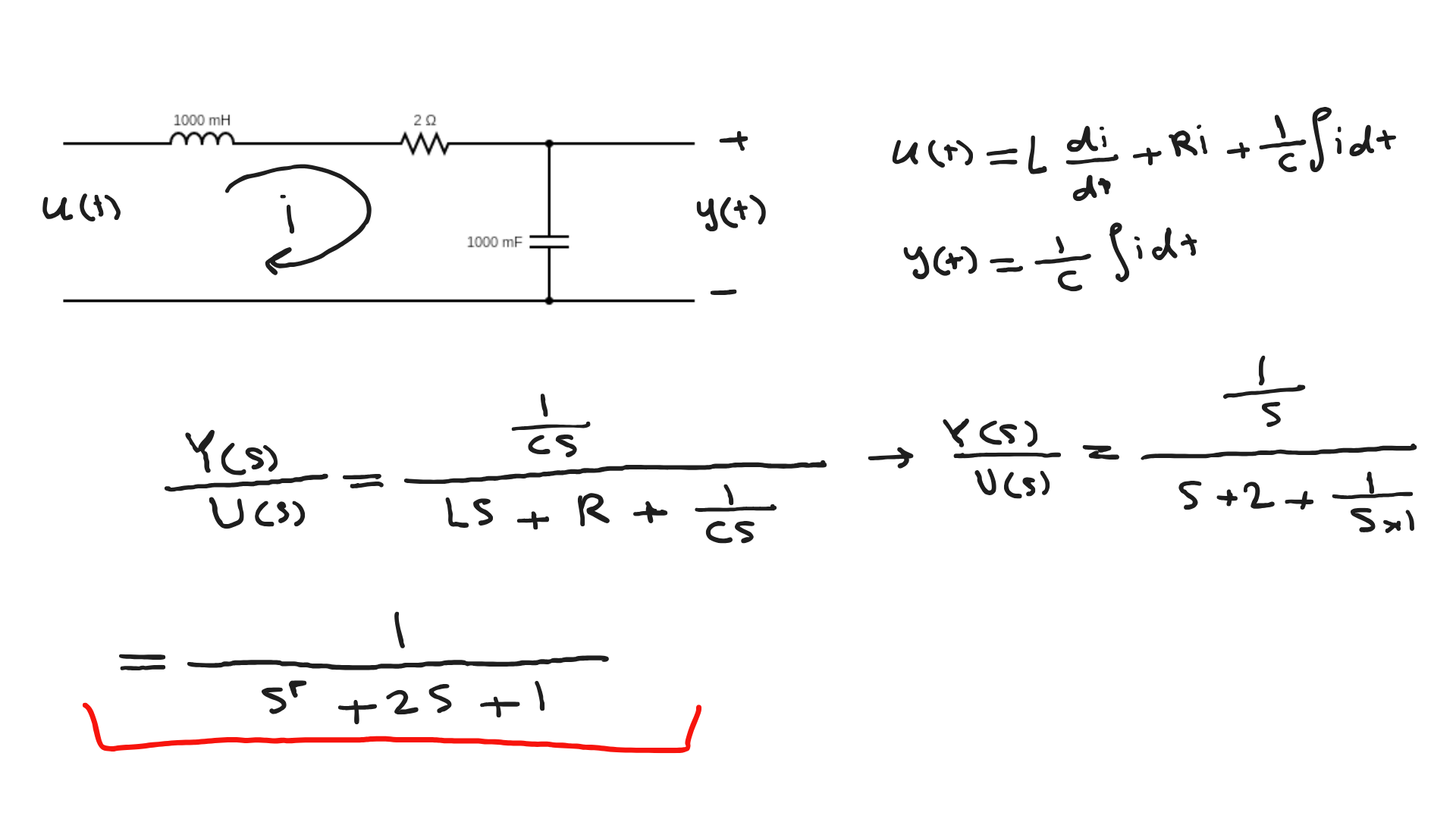
تست : سال 75-76 ( دکتری اعزام به خارج )
تابع تبدیل مدار الکتریکی نشان داده شده در شکل زیر عبارتست از :

دیدگاه خود را بنویسید