 09112441370
09112441370

هر یک از توابع نمایانگر جزیی از اجزای سیستم کنترل است ، مانند سیستم، عملگرها، حسگرها یا کنترلکنندهها. شما میتوانید توابع مدل را به هم متصل کنید تا مدلهای ترکیبی از دیاگرامهای بلوکی بسازید که پاسخ ترکیبی عناصر متعدد را نمایش دهند.
شما میتوانید هر یک از اجزاء را به عنوان یک مدل شیء نمایندگی کنید. نیازی نیست که برای هر جزء از یک نوع مدل شیء مشابه استفاده کنید. به عنوان مثال، سیستم G را به عنوان یک مدل صفر-قطب-گین (zpk) با یک قطب دوگانه در s = -1 نمایش دهید؛ C را به عنوان یک کنترلر PID، و F و S را به عنوان تابعهای انتقال.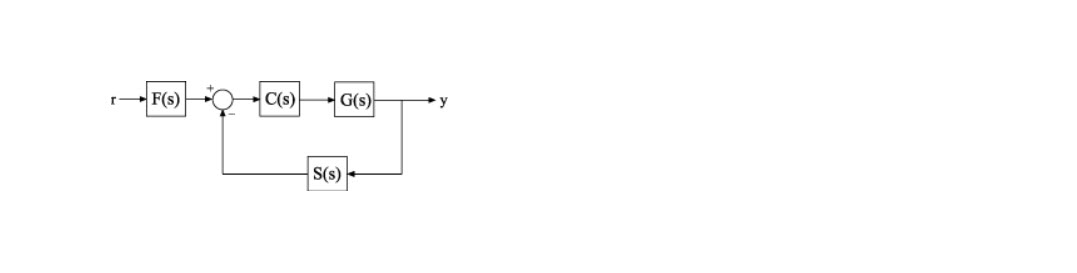 شما میتوانید هر یک از اجزا را به عنوان یک شی مدل نمایش دهید. نیازی به استفاده از همان نوع شی مدل برای هر جزء نیست. به عنوان مثال، سیستم G را به عنوان یک مدل صفر-قطب-گین (zpk) با یک قطب دوبل در s = -1 نمایش دهید؛ C را به عنوان یک کنترلر PID و F و S را به عنوان تابعهای انتقال نمایش دهید.
شما میتوانید هر یک از اجزا را به عنوان یک شی مدل نمایش دهید. نیازی به استفاده از همان نوع شی مدل برای هر جزء نیست. به عنوان مثال، سیستم G را به عنوان یک مدل صفر-قطب-گین (zpk) با یک قطب دوبل در s = -1 نمایش دهید؛ C را به عنوان یک کنترلر PID و F و S را به عنوان تابعهای انتقال نمایش دهید.
; G = zpk([],[-1,-1],1)
; C = pid(2,1.3,0.3,0.5)
; S = tf(5,[1 4])
; F = tf(1,[1 1])
سپس میتوانید این عناصر را ترکیب کرده و مدلهایی بسازید که سیستم کنترلی را نمایندگی کنند. برای مثال، پاسخ باز حلقه SGC را ایجاد کنید.
; open_loop = S*G*C
برای ساخت مدل پاسخ حلقه بسته بدون فیلتر، از دستور فیدبک استفاده کنید:
; T = feedback(G*C,S)
برای مدلسازی پاسخ کل سیستم بسته از r به T، y را با تابع تبدیل فیلتر ترکیب کنید :
; Try = T*F
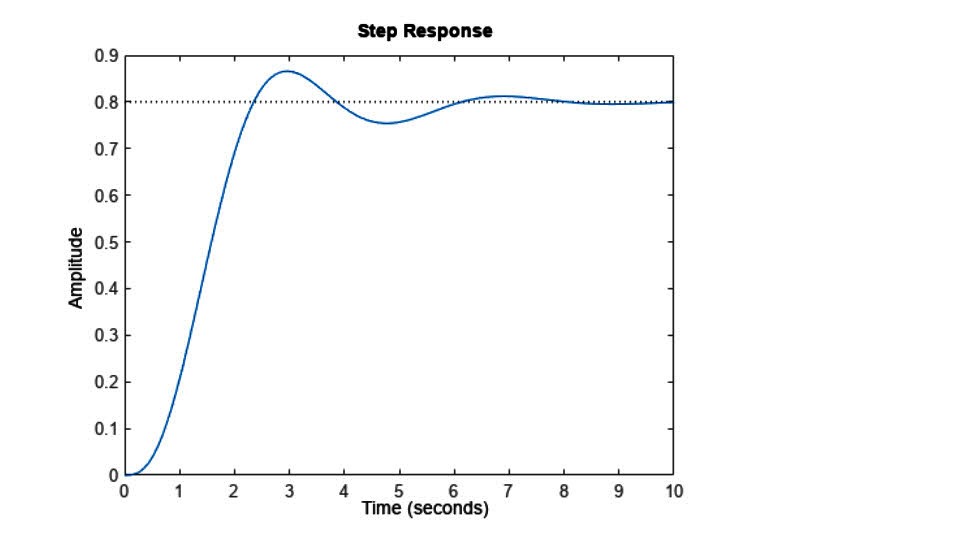
نتایج open_loop، T و Try نیز اشیاء مدل خطی هستند. شما میتوانید با استفاده از دستورات طراحی و تحلیل کنترل سیستم در Control System Toolbox™ بر روی آنها عملیات انجام دهید. به عنوان مثال، پاسخ مرحلهای کل سیستم را ترسیم کنید:
stepplot(Try)
زمانی که مدلهای عددی LTI را ترکیب میکنید، مدل عددی LTI حاصل نمایانگر سیستم تجمیعی است. مدل حاصل دادههای اصلی از اجزای ترکیبشده را حفظ نمیکند. به عنوان مثال، T به طور جداگانه دینامیکهای اجزا G، C و S را که برای ایجاد T ترکیب شدهاند، ردیابی نمیکند.
جهت انجام پروژه سیستم های کنترل با متلب با ما تماس بگیرید .
همچنین جهت آموزش و شرکت در دوره ی آنلاین این تخصص با ما در تماس باشید .
09112441370

دیدگاه خود را بنویسید