 09112441370
09112441370
جبران کننده ها ( compensators) برای اصلاح عملکرد حلقه های کنترل به کار برده می شوند .
از دیدگاه تئوری ، کار یک جبران کننده ، شبیه به کار کنترل کننده است . به همین دلیل گاهی از جبران کننده و کنترل کننده به عنوان عبارات مترادف استفاده می شود .
با این وجود در کنترل صنعتی این دو عبارت دو اصطلاح متفاوت می باشند .
جبران کننده ها معمولا برای اصلاح رفتارهای مشخصا نامطلوب استفاده می شوند و عموما بعد از طراحی و نصب به آسانی قابل تنظیم و تغییر نمی باشند ، به علاوه یک جبران ساز ممکن است در مسیر رفت یا مسیر برگشت حلقه کنترل قرار گیرد .
کنترل کننده ها معمولا برای اصلاح رفتارهای نامطلوب جزیی استفاده می شوند و تنظیم و تغییر آنها به آسانی امکان پذیر است .
همچنین آنچه که در کنترل صنعتی بنام کنترل کننده معروف است همیشه در مسیر رفت حلقه کنترل نصب می گردد .
کنترل کننده در یک سیستم معمولا در دسترس و در معرض دید استفاده کننده می باشد .
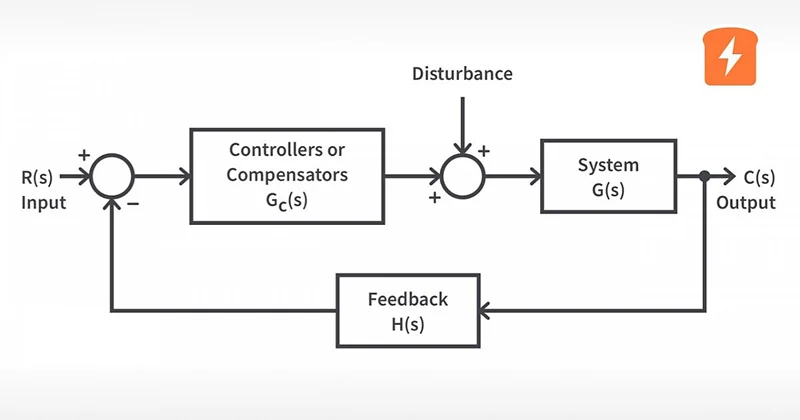
رفتار یک سیستم تحت تاثیر مکان صفرها و قطب های آن است .
شکل زیر پاسخ پله متناظر با چندین موقعیت قطب در یک سیستم سه قطبی را نشان می دهد .
هر گاه سیستمی دارای رفتاری نامطلوب باشد ، میتوان با اضافه کردن صفر و قطب و یا ایجاد قطب ( قطب ها ) مسلط زفتار آنرا اصلاح نمود که این کار با استفاده از جبران کننده انجام می شود .
تاثیر اضافه کردن قطب یا صفر به یک سیستم را می توان به صورت زیر خلاصه نمود :
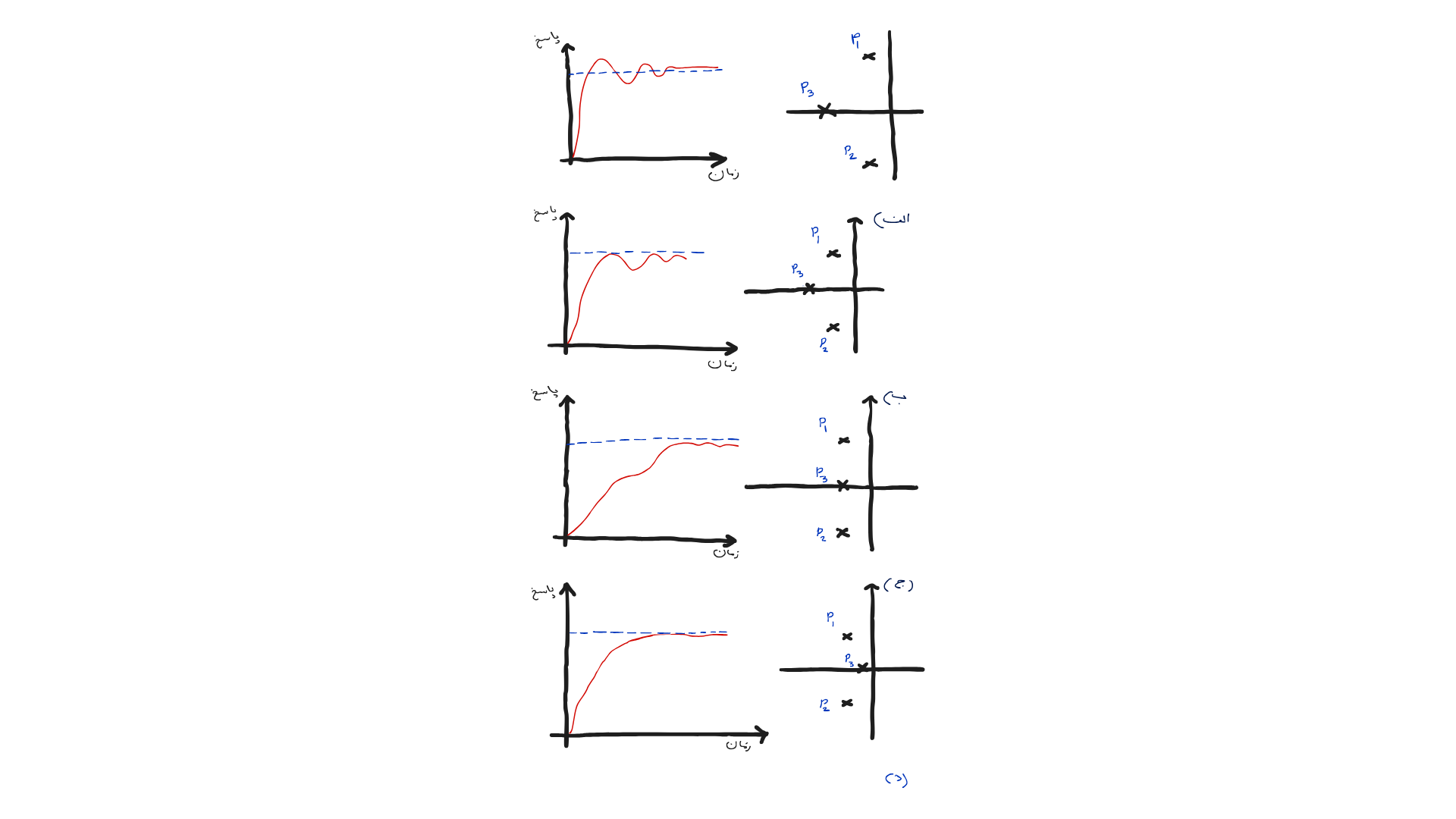
اضافه کردن قطب به حلقه کنترل عموما موجب کشیده شدن مکان ریشه های سیستم به سمت راست و در نتیجه کاهش پایداری نسبی و طولانی شدن زمان قرار در سیستم می شود و از طرف دیگر خطای ماندگار را کاهش می دهد .
شکل زیر تاثیر کیفی اضافه کردن قطب در جابجایی مکان ریشه ها را نشان می دهد .
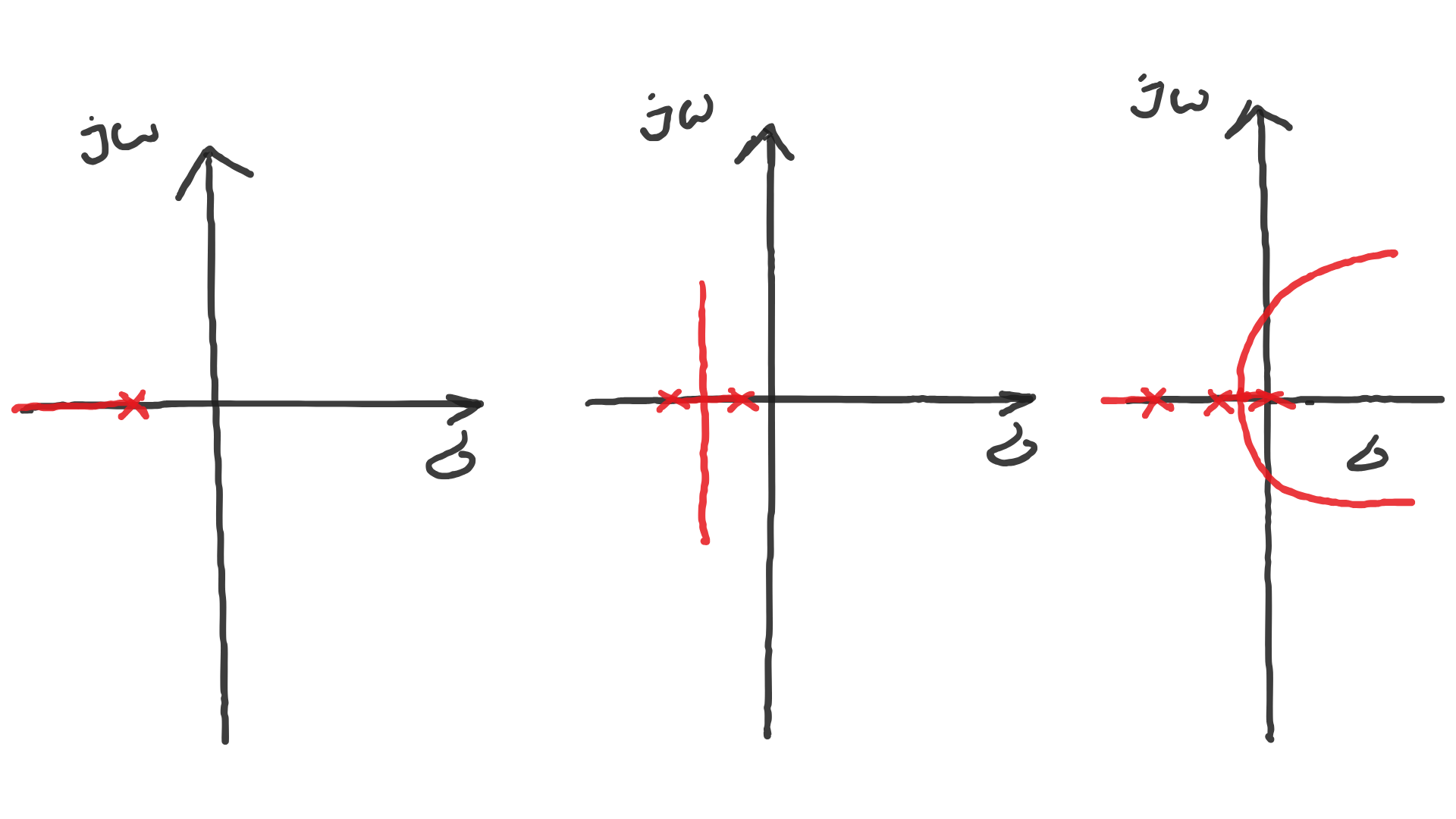 اضافه کردن صفر به حلقه کنترل عموما مکان ریشه را به سمت چپ می کشد و موجب افزایش پایداری و همچنین افزایش سرعت سیستم می گردد .
اضافه کردن صفر به حلقه کنترل عموما مکان ریشه را به سمت چپ می کشد و موجب افزایش پایداری و همچنین افزایش سرعت سیستم می گردد .
شکل زیر الف ) سیستمی را نشان می دهد که به ازای گین های زیاد ناپایدار است و در شکل های ب ، ج ، د ) اثر اضافه شدن صفر به حلقه کنترل مشاهده می شود .
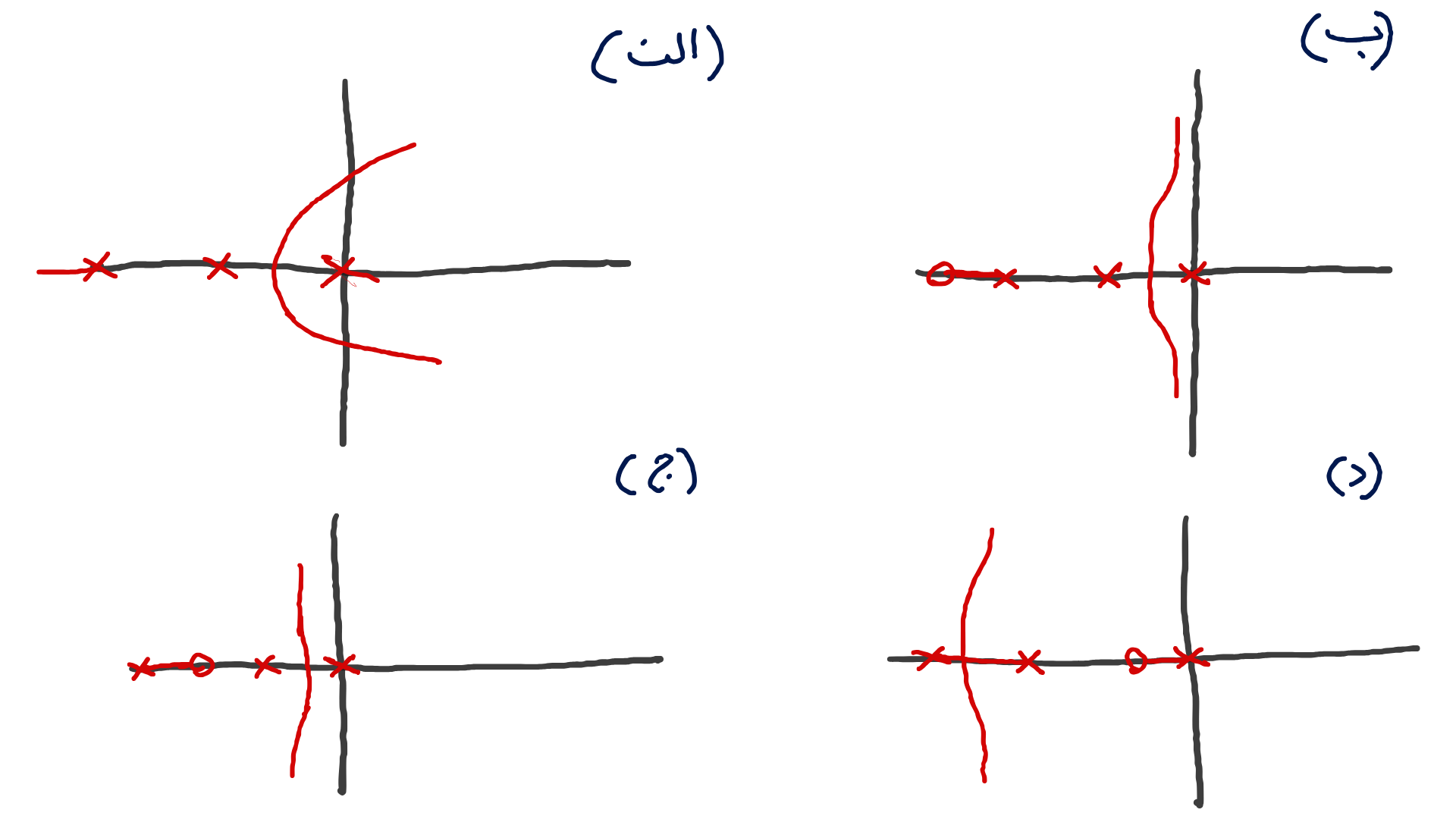
همانطور که ملاحظه می کنید با کشیده شدن مکان به سمت چپ ، پایداری افزایش می یابد و می توان گین سیستم را تا مقادیر بیشتری افزایش داد .
جبران کننده ها معمولا به صورت پیش فاز ( Lead ) ، پس فاز ( Lag ) و یا پس _ پیش فاز ( Lead_Lag ) ساخته می شوند .

دیدگاه خود را بنویسید